Meaning that treating a Wheel's speed as a continuous range from 0-600 Encoder Counts/minute just isn't something that the Wheels' motors can deliver.
To address this, I collected PWM Count vs. Wheel Encoder Count Response Curves from a dozen test runs driving my Robot up and down the hallway, and segmented each Wheel's Speed Range into non-overlapping sub-ranges, called Encoder Count Ranges.
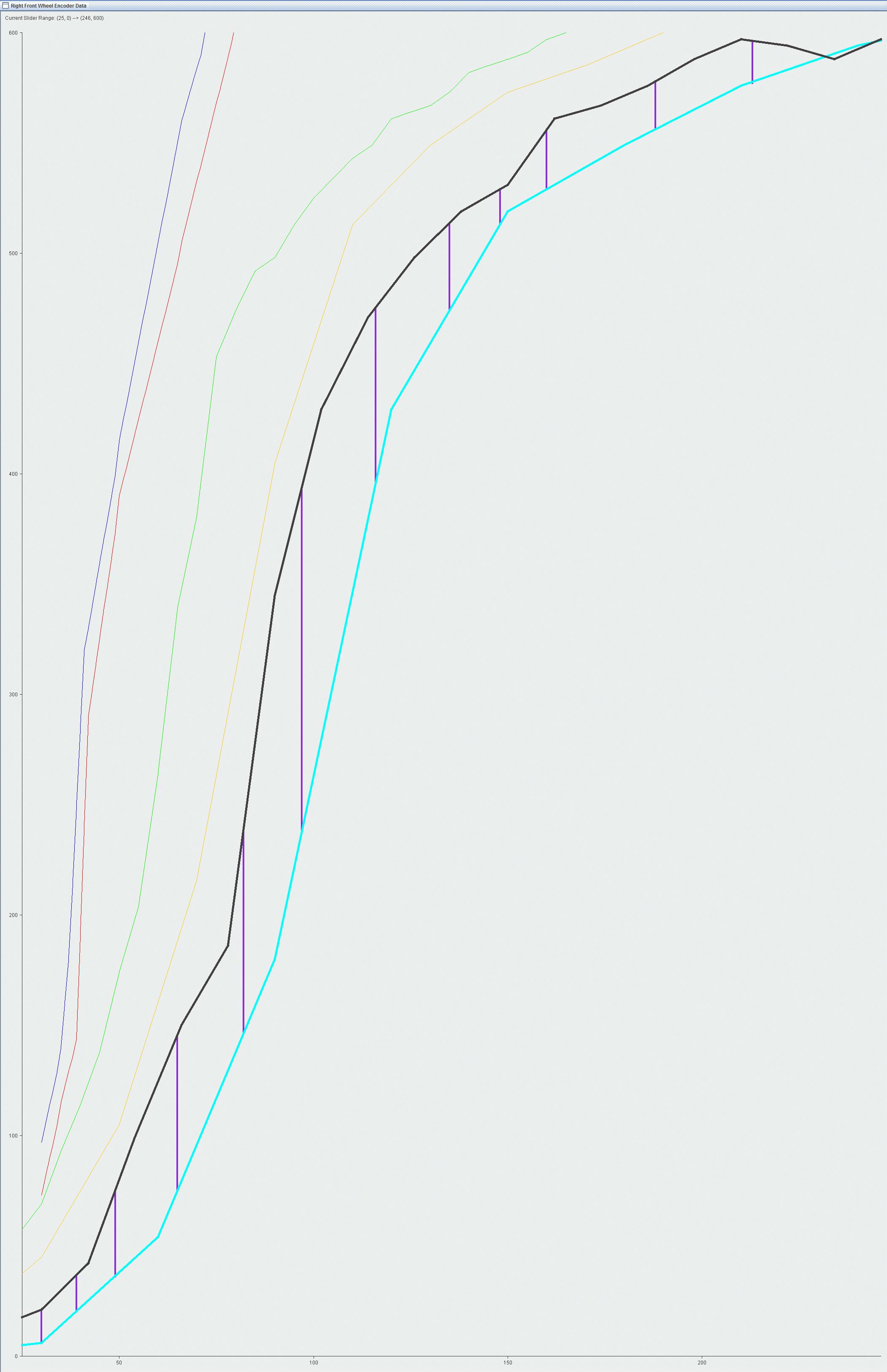
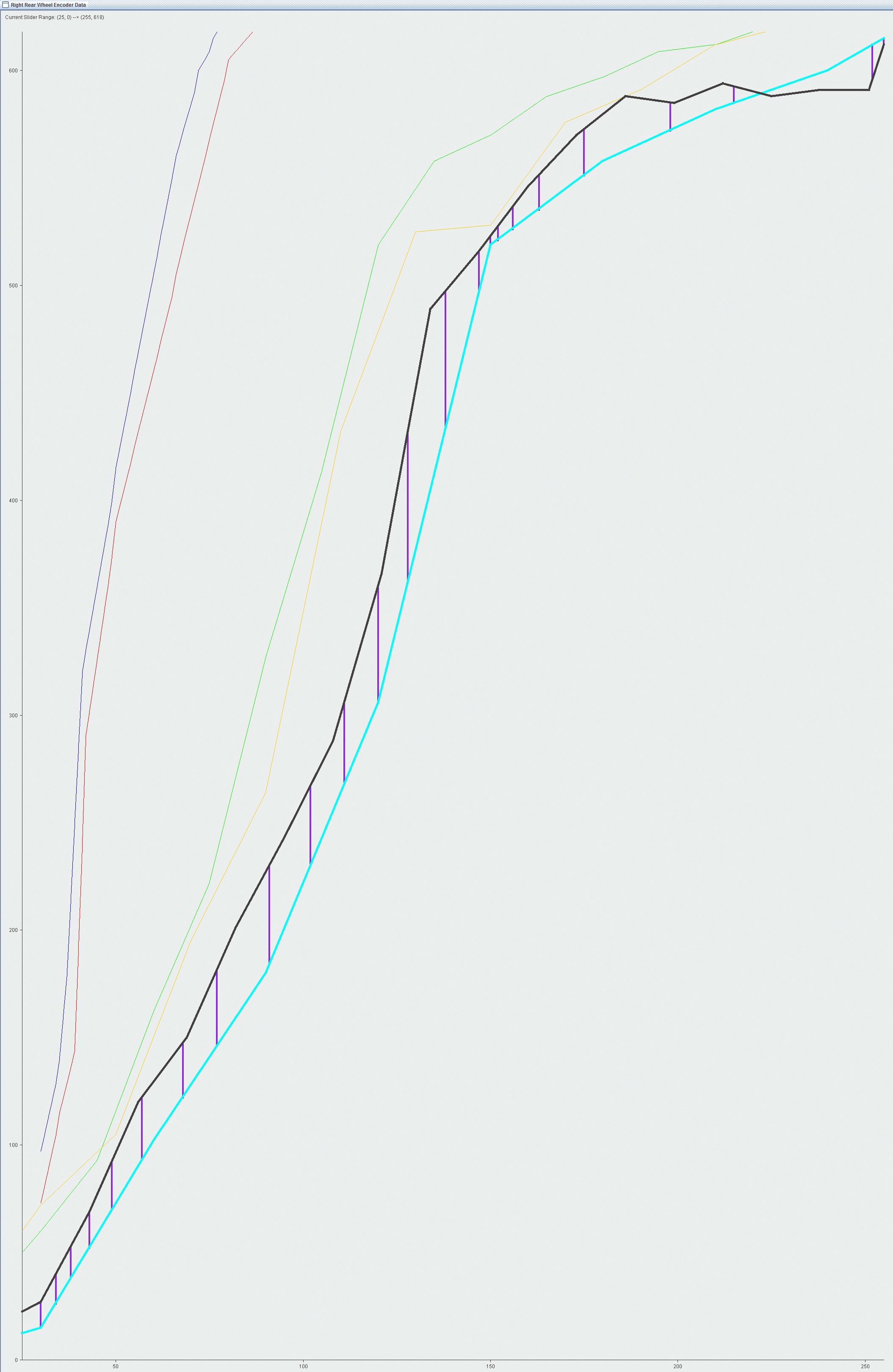
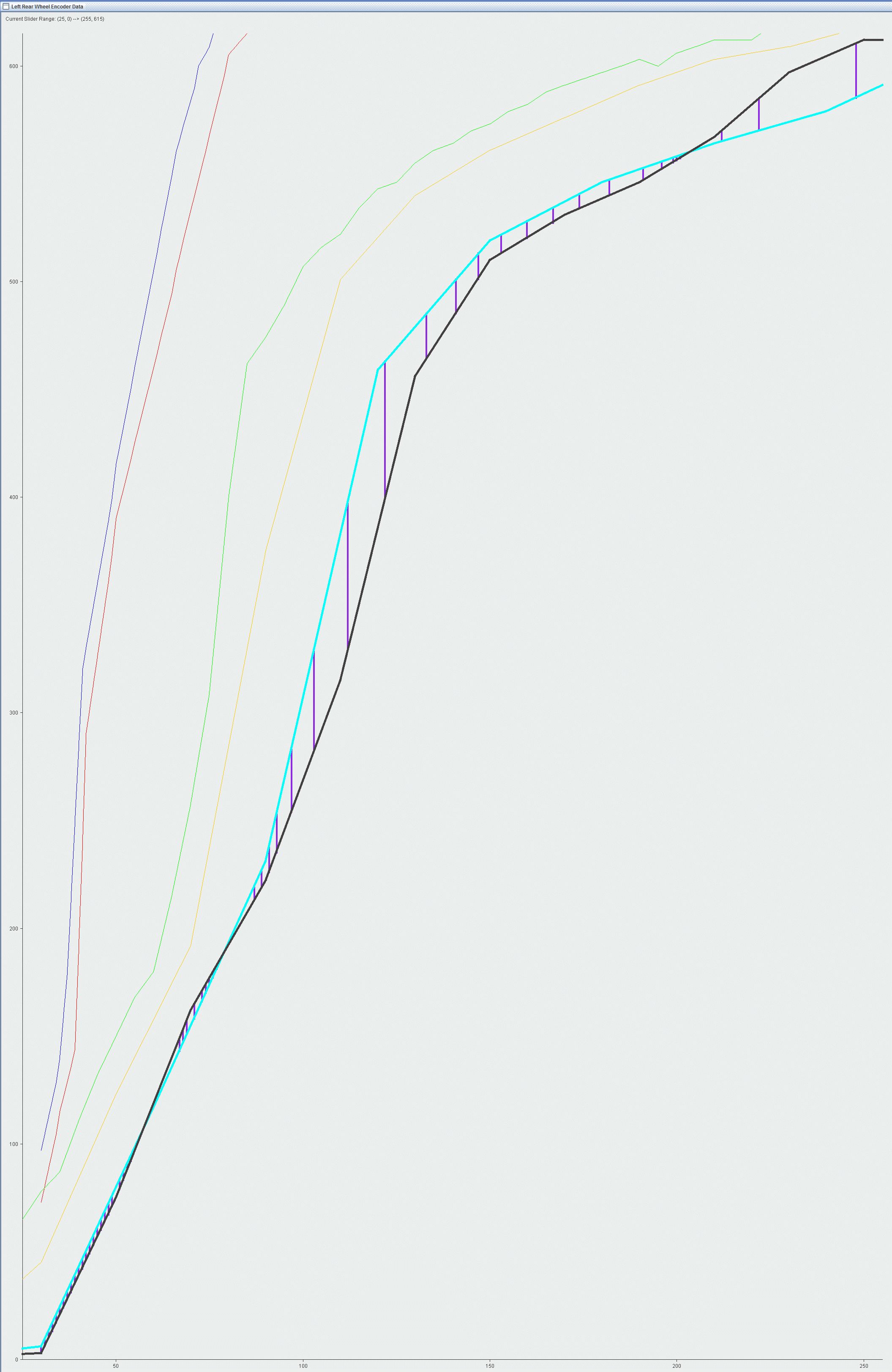
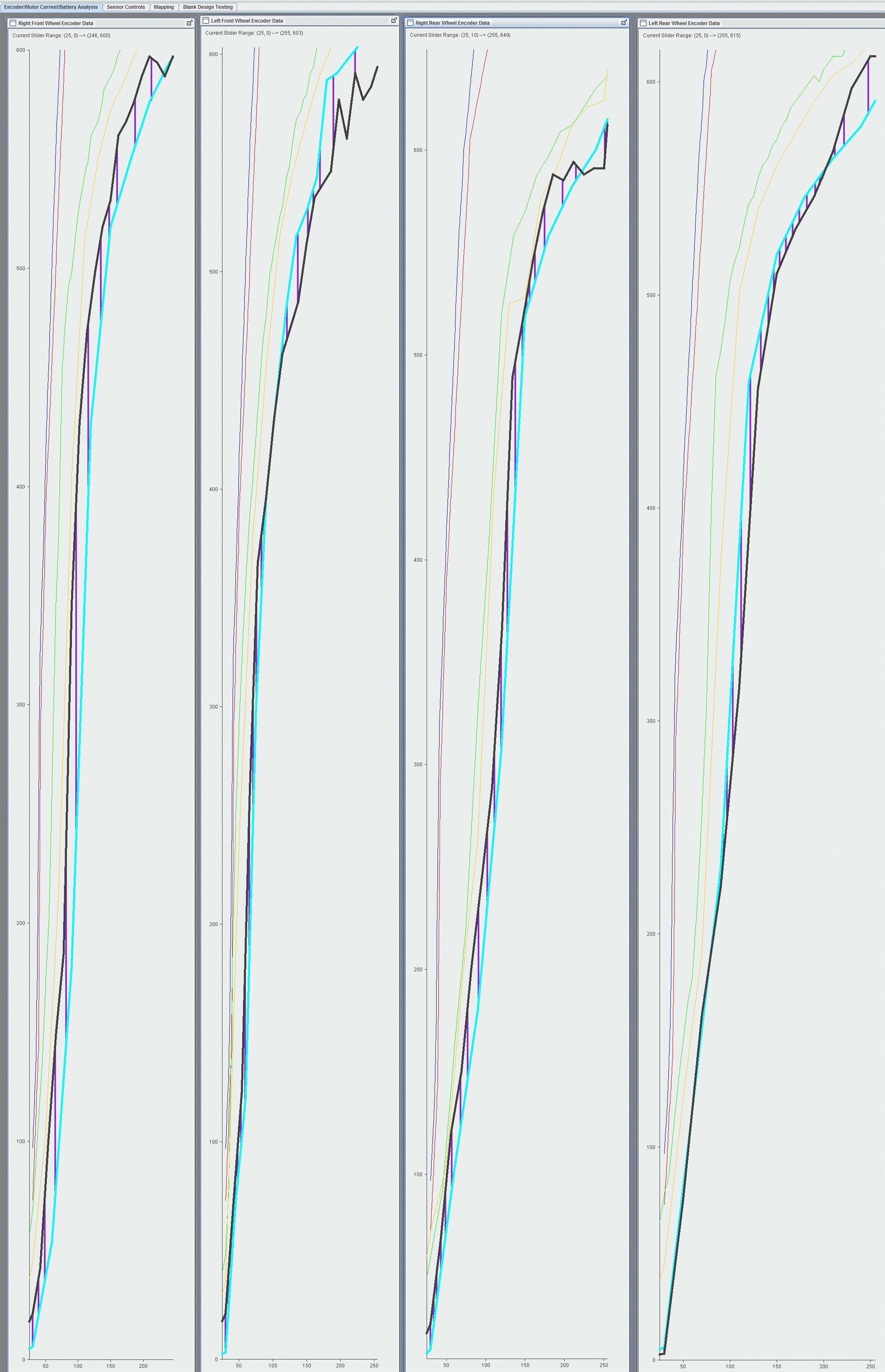
To do this, I first obtained from those test runs the the Black upper-bound line and the Cyan lower-bound line for each Wheel, as shown below.
I wrote a function that starts at the first data point on the Cyan line, and draws a vertical Purple line up to the Black upper-bound line.
To find the lower end of the next Purple line, the function moves horizontally to the right, back to the Cyan line. The point that the function lands on on the Cyan line becomes the lower end of the next Purple line.
The function continues like this, drawing a series of Purple "Steps" all the way to the end of the Plot. Each of these Steps I call an Encoder Count Range.
The usage for these Encoder Count Ranges is as follows:
When the Robot's control program commands that a Wheel rotate at a particular speed (expressed in Encoder Counts/minute), a function determines in which Encoder Count Range that speed lies.
That Encoder Count Range's PWM value is then sent to the Wheel, with the claim that the Wheel will now begin rotating at a speed "somewhere" within the chosen Encoder Count Range.
For example, to command each of the Wheels to rotate at an Encoder Count/minute "near" 100, I send each Wheel a its own unique PWM value as shown here (click on the image to open a larger view of it in a new Window):
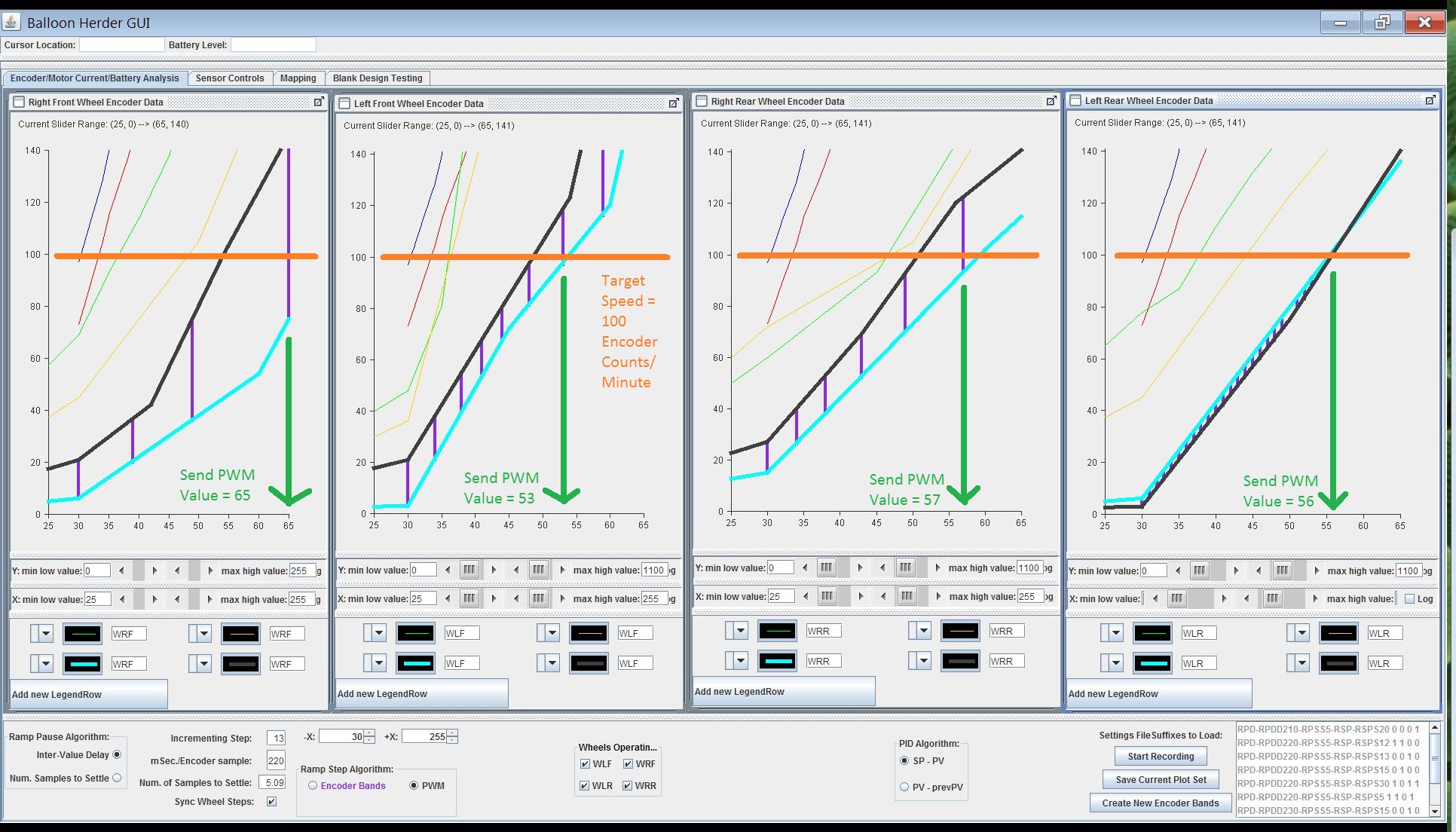
This approach provides a general way to reliably deliver "close" to the requested Wheel speed while allowing for the variation between Wheels, as well as taking into account the unpredictable behavior exhibited by each Wheel.
Click on any of the 5 images below to open a new Window/Tab in your Browser to see greatly enlarged versions of the Purple Vertical Lines for each of the 4 wheels:

Unfortunately with this approach, very few distinct Wheel speeds are possible.
Here is a screenshot of my full Robot Control program: