Debugging by comparing EncoderBand plots vs. displaying them on the MotorSliders
Below is the "Virtual Joystick" GUI that I use to navigate the Robot.
It's also used to test and develop new wheel speed control algorithms to
accomplish the simultaneous Rotate and Translate capabilities that Mecanum
wheels are capable of.
The Blue arrow: Chassis heading.
Red arrow: Chassis motion direction.
Magenta arrow: Points to the center of revolution about a fixed point.
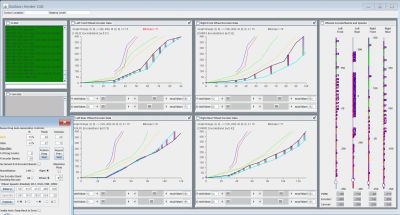
Below is a detailed screenshot showing the speed-change ramps that I'm evaluating.
My goal here is to be able to execute the most accurate rotation + revolution +
translation maneuvers that Mecanum wheels are capable of.
The movie below shows the various aspects of the Robot's Steering GUI: